Naturalis v1.3: Physics Parameters
Breasts use bones and joints that connect to the chest and hang off of it, affected by gravity according to the joint’s mass. These joints can rotate, move and jiggle depending on the exact physics settings such as springs, dampers and joint limits. For glutes, it works the same, with glute joints which connect to the hip.
Soft physics enables an additional system where individual skin vertices have “soft physics joints”, forming a “soft physics mesh” that covers the glutes/breasts. It adds more fine grained jiggle physics to the skin and enables much more accurate collision detection at the cost of CPU performance.
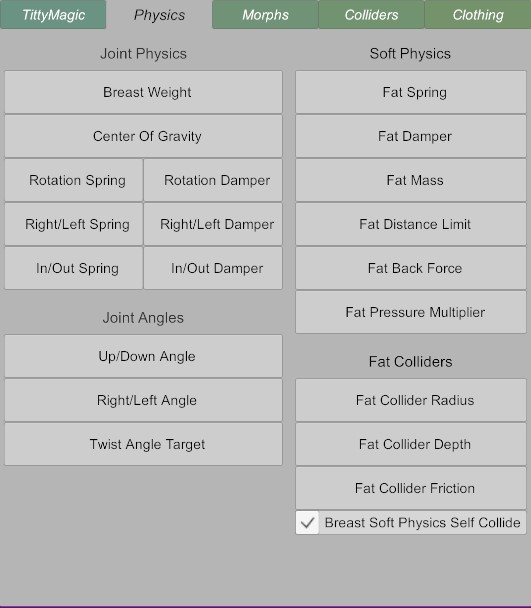
Based on this, physics parameters are divided into joint physics parameters and soft physics parameters. Joint physics parameters are further divided into Joint Physics and Joint Angles groups, and soft physics parameters are further divided into Soft Physics and Fat Colliders groups.
The values of physics parameters are calculated automatically during calibration. The calibrated value depends on the model’s glute/breast size and the sliders in the main window (softness, quickness and mass offset). For more precise customization, see Physics Customization which goes over offsetting the parameters directly, and additional options for joint physics and soft physics. Parameter values can be affected by clothing adjustment profiles.
Joint Physics Parameters
These parameters are equivalent to the Additional Joints parameters in the F Glute Physics and F Breast Physics 1 tabs when using standard VAM physics, but also include extra parameters and many features that are unique to Naturalis.
An explanation of each parameter and what it does is included within the plugin UI as well.
In Breast Weight / Glute Weight window:
| Glute Joint Mass / Breast Joint Mass | Mass of the glute/breast joint. Multiplied by the gravity force, this produces the weight of the joint. |
| Breast Gravity / Glute Gravity | Custom direction based gravity implementation which overrides the 9.81 m/s^2 gravity experienced by the joint by default. |
| Rotation Inertia | The joint’s resistance to change in rotation. |
Continuing down the list:
| Center Of Gravity | Position of the joint’s center of mass. At 1 it is at the skin surface. |
| Rotation Spring | Rotation Spring pushes the joint towards its angle target. The angle target is defined by the Up/Down and Left/Right Angle Target parameters. |
| Rotation Damper | Rotation Damper reduces oscillation around the joint’s angle target. The higher the damper, the quicker the joint will stop swinging back and forth. |
| Right/Left Spring | (TittyMagic only) Right/Left Spring pushes the pectoral joint towards its position target along the X axis. |
| Right/Left Damper | (TittyMagic only) Right/Left Damper reduces oscillation around the joint’s position target along the X axis. |
| In/Out Spring | In/Out Spring pushes the joint towards its position target along the Z axis. |
| In/Out Damper | In/Out Damper reduces oscillation around the joint’s position target along the Z axis. |
In the Up/Down Angle window:
| Up/Down Base Angle | Adjusts the joint’s vertical rotation using morphs. This is used to offset the amount of droop caused by other physics parameters such as angle target, mass and spring. |
| Up/Down Angle Target | Vertical target angle of the joint. A negative value pulls the joint down, a positive value pushes it up. |
| Up Angle Limit | The maximum angle the joint can rotate up. |
| Down Angle Limit | The maximum angle the joint can rotate down. |
In the Right/Left Angle window:
| Right/Left Base Angle | Adjusts the joint’s sideways rotation using morphs. |
| Right/Left Angle Target | Horizontal target angle of the joint. A negative value pulls the joints apart, a positive value pushes them together. |
| Right/Left Angle Limit | The maximum angle the joint can rotate sideways. |
And finally, exclusive to TittyMagic:
| Twist Angle Target | Forward axis angle of the pectoral joint. The final value depends on the person’s pose. The offset determines the max angle when the person is upright. The angle is inverted when upside down and zero when horizontal. |
Soft Physics Parameters
These form the set of parameters that controls the behavior of the glute/breast soft physics mesh. They are broadly equivalent to the Soft Physics parameters in the F Glute Physics and F Breast Physics 2 tabs when using standard VAM physics, however with a lot of additional features, and the Fat Pressure Multiplier parameter is specific to the Mesh Pressure feature introduced in Naturalis v1.3.
All parameters (except Fat Back Force) have a smooth gradient from the outer edge to the middle of the mesh that gives each soft physics joint a slightly different value, and support Depth Physics and Local Distortion Physics adjustments.
Soft physics:
| Fat Spring | Fat Spring holds each soft joint in its target position. Low fat spring makes the soft physics mesh soft and slow. High fat spring makes it rigid and quick to return to its normal shape. |
| Fat Damper | Fat Damper reduces oscillation of each soft joint around its target position. Low fat damper makes the soft physics mesh jiggle more easily. |
| Fat Mass | Fat Mass determines the mass of each soft joint and the overall density of the mesh. Increasing glute/breast size without increasing fat mass reduces density. |
| Fat Distance Limit | Fat Distance Limit is the maximum distance each soft joint can move away from its target position. |
| Fat Back Force | Fat Bk Force applies a force to the joint based on the movement of each soft joint. The Max Force and Threshold parameters can be used to limit how easily and how much force gets applied. |
| Fat Pressure Multiplier | Controls the amount of internal pressure force, and thus the amount that the mesh expands when something deforms it. |
Fat colliders:
| Fat Collider Radius | Fat Collider Radius is a scaling factor for the size of the colliders connected to each soft joint. The actual size varies per collider and automatically scales with glute/breast size. |
| Fat Collider Depth | Fat Collider Depth offsets collider positions relative to skin surface. Negative values pull colliders out from the glute/breast, positive values push them into the glute/breast. |
| Fat Collider Friction | Fat Collider Friction sets the stickiness of individual soft colliders. |